穩(wěn)定性與控制問題方框圖用傳遞函數(shù)TF來表示整個系統(tǒng)的特性;物理系統(tǒng)動力學可以使用微分方程來描述動態(tài)特性。本文興迪源機械帶來伺服控制專輯之方框圖及系統(tǒng)動力學。
一、伺服控制專輯—方框圖:
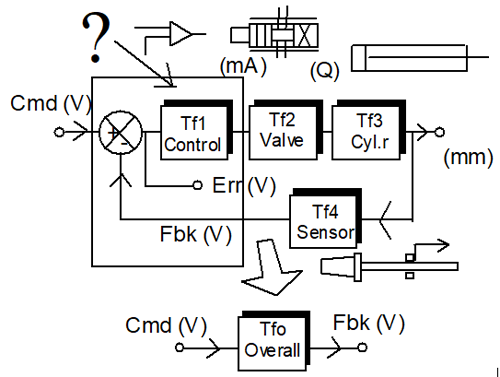
簡介:穩(wěn)定性與控制問題 方框圖 用傳遞函數(shù)TF來表示整個系統(tǒng)的特性。各個環(huán)節(jié)的傳遞函數(shù)Tf1,Tf2,Tf3,Tf4共同作用,得到一個新的系統(tǒng)傳遞函數(shù),可以表達輸出Fbk(V)與輸入Cmd(V)之間的關系。這就是系統(tǒng)Tfo的閉環(huán)傳遞函數(shù) ...
1)穩(wěn)定性與控制問題
方框圖
用傳遞函數(shù)TF來表示整個系統(tǒng)的特性。各個環(huán)節(jié)的傳遞函數(shù)Tf1,Tf2,Tf3,Tf4共同作用,得到一個新的系統(tǒng)傳遞函數(shù),可以表達輸出Fbk(V)與輸入Cmd(V)之間的關系。這就是系統(tǒng)Tfo的閉環(huán)傳遞函數(shù),可以將其轉換為時間或頻率響應,用以分析系統(tǒng)的性能。為了得到整個系統(tǒng)的閉環(huán)傳遞函數(shù)Tfo,怎樣確定控制器Tf1?
2)開環(huán)分析
Bode和其他人(比如奈奎斯特等)創(chuàng)建了一種基于開環(huán)頻率響應的分析方法,用以確定控制器Tf1的性能??刂破鱐f1將輸出Fbk(V)與誤差Err(V)進行比較。計算方法如下:環(huán)路中的每個環(huán)節(jié)都有一個幅度(K1,K2,K3,K4),用DB表示;和一個相位(φ1,,φ2,φ3,φ4),每個環(huán)節(jié)的幅值和相位都隨頻率變化,即為各個環(huán)節(jié)的頻率響應。在給定頻率下,整個系統(tǒng)開環(huán)響應的增益是各個環(huán)節(jié)的增益之積;即K1.K2.K3.K4。(用對數(shù)坐標表示)。在給定頻率下,整個開環(huán)響應的相位是各個相位的總和。即φ1+φ2+φ3+φ4。
0dB增益時的總相位滯后應不大于135°;即相位裕度大于(180-135)= 45°。(相位裕度相當于保險系數(shù))
180°相位滯后點的增益應不大于-10dB;即增益裕度為10dB。
(注:這個可以根據(jù)要求自己設定)
增益增加時,穩(wěn)定裕度會相應降低。控制器增益K1應根據(jù)系統(tǒng)需要做相應調(diào)整。
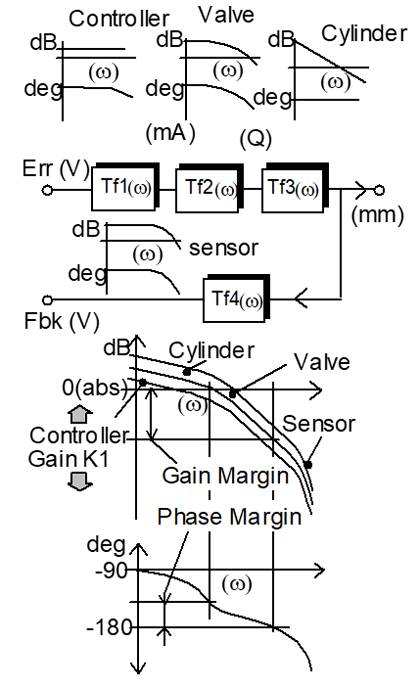
注:在以上幅頻特性和相頻特性中,橫縱標為頻率,10倍頻增加,縱坐標為幅值,單位為DB。
controller為控制器,PID的整定在此完成,PID的相關知識在下一節(jié)重點討論;valve為伺服閥,等效為二階震蕩環(huán)節(jié),所以其幅值隨頻率的增加而衰減,相位隨頻率的增加而滯后;cylinder為油缸,油缸輸入為流量,表現(xiàn)出的特性是速度v=Q/A,假設被控量為位移,那么油缸就是一個積分環(huán)節(jié)1/s=1/(jw)=-j/w。所以其幅頻特性為|G(jw)|=|1/jw|=1/w。相位特性為-arctgw/0=-90°。恒定滯后90°。由此可知,積分環(huán)節(jié)的相頻特性與角頻率無關。
表明積分對輸入信號(一般為正弦信號)有90°的滯后作用,其幅頻特性為1/w,是w 的函數(shù),當w由零變到無窮大時,輸出幅值則由無窮大衰減至零。在|G(jw)|平面上,積分環(huán)節(jié)的頻率特性與負虛軸重合。
二、伺服控制專輯——系統(tǒng)動力學:
簡介:物理系統(tǒng)動力學 可以使用微分方程來描述動態(tài)特性。將傳遞函數(shù)(TF)用拉普拉斯算子的方式表示出來會便于理解。每個傳遞函數(shù)都具有時域特性和頻域特性,時域對應著階躍響應,頻域對應著幅頻特性。例如: 積分環(huán)節(jié)TF(K)( ...
物理系統(tǒng)動力學
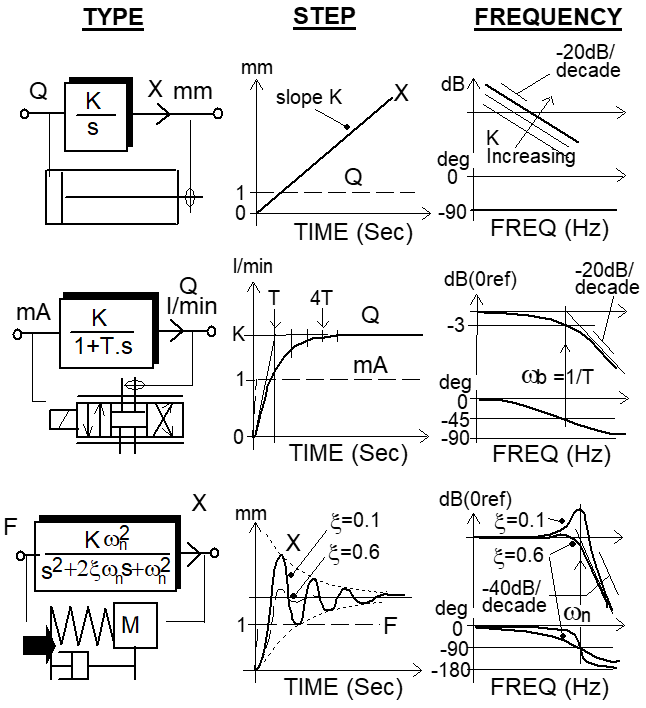
可以使用微分方程來描述動態(tài)特性。將傳遞函數(shù)(TF)用拉普拉斯算子的方式表示出來會便于理解。每個傳遞函數(shù)都具有時域特性和頻域特性,時域對應著階躍響應,頻域對應著幅頻特性。例如:
積分環(huán)節(jié)TF(K)(K為增益)
-單位油缸進油量為K mm / s,油缸進油時,表現(xiàn)出速度特性(v=Q/A),但對于位移來說,就是積分過程。速度的積分是位移。階躍-上升,僅在輸入指令為0時停止。頻率-增益隨著-20dB/ dec的頻率而衰減,;相位滯后始終-90°。(這是積分環(huán)節(jié)的典型伯德圖特征,具體推導可參見《自動控制原理》
一階TF(K,T)-(K為增益,T為慣性環(huán)節(jié)的周期)
例如伺服閥的指令輸入為mA時,其輸出流量以指數(shù)方式上升至K l / min。(此時伺服閥等效為一階慣性環(huán)節(jié))階躍-初始斜率K /T,在4.T之后達到穩(wěn)態(tài)值。頻率-帶寬(-3dB)和45°相位滯后為1 /T(rad / s)。(角頻率為1/T時是慣性環(huán)節(jié)的轉折頻率。所謂轉折頻率,就是從該頻率處,幅值還是顯著下降,以-20DB/dec 的斜率下降)
二階TF(K,kesi ,wn)-
例如 -單位質量/彈簧系統(tǒng)就是一個典型的二階震蕩系統(tǒng)。在外部力的驅動下,其系統(tǒng)震蕩的固有頻率為wn,衰減阻尼系數(shù)為kesi,kese=(K/m)^1/2。K為彈簧的剛度。在液壓系統(tǒng)中,K為容腔的剛度。 90°相位滯后點出現(xiàn)在wn處,但實際峰值dB頻率出現(xiàn)在低于wn的某個頻率上,具體取決于阻尼系數(shù)kesi。對于過阻尼的kesi,即> 0.7,不會發(fā)生dB過沖。DB過充就是諧振峰值,對應著階躍響應中的超調(diào)。具體換算過程,參加前面公眾號內(nèi)容:控制專輯-階躍響應。
注意:
1.一個系統(tǒng)的傳遞函數(shù),可以將每個環(huán)節(jié)的物理方程寫出來,然后換算成拉普拉斯算子,最終可以求得整個系統(tǒng)的傳遞函數(shù)TF;或通過最小二乘法直接擬合測得的階躍和/頻率響應數(shù)據(jù)。(注:這種方式是將整個系統(tǒng)看作黑匣子,根據(jù)階躍響應和幅頻特性數(shù)據(jù),利用最小二乘法直接擬合,也可以擬合為三次或者更高層次的曲線。EXCEL表格就可以擬合)。后者通常用于從樣本中獲得簡單的伺服閥模型。一階和二階模型均可用于表示伺服閥。這個主要看系統(tǒng)的帶寬。如果伺服閥的帶寬高于系統(tǒng)的五倍以上,可以將伺服閥等效為一階系統(tǒng),如果伺服閥帶寬為系統(tǒng)的3-5倍,可將伺服閥等效為二階系統(tǒng)。
2.完整的系統(tǒng)可能需要大量的傳遞函數(shù)來表示動力學。這需要按照系統(tǒng)的先后順序逐個求出每個環(huán)節(jié)的傳遞函數(shù),然后組合起來。這樣系統(tǒng)將會非常復雜。例如,閥控缸的模型將是四階的。這非常復雜,也沒必要。